Noby: робот, имитирующий девятимесячных детей
Ученые из Токийского университета разработали уникального робота-андроида под названием Noby, который моделирует поведение девятимесячного ребенка. Интересное устройство создано в рамках проекта по созданию человекоподобных роботов, который финансируется Агентством науки и технологий Японии.
Как отметил профессор Токийского университета Куниёси (Kuniyoshi), в робота можно загружать программное обеспечение, наблюдать за тем, как Noby реагирует на людей и окружающий мир, после чего сравнивать его поведение с поведением реальных детей. Если требуется изменить поведение Noby, достаточно просто модифицировать ПО.
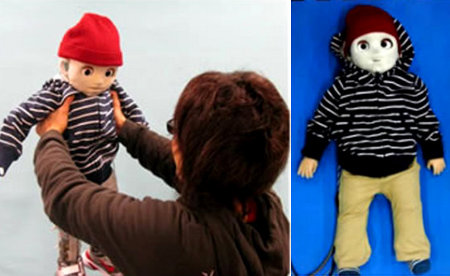
Робот-ребенок весит почти 8 кг, а его рост составляет 71 см. Он покрыт кожей, в которую встроено 600 датчиков. Слуховая система представлена чувствительным микрофоном, а зрением служат видеокамеры. Всё это подсоединено к мощному компьютеру.
Изучение именно девятимесячного младенца выбрано не случайно. Именно в этот период жизни человека происходит очень быстрое развитие двигательных и познавательных функций. Noby поможет ученым понять, как ребенок реагирует на окружающую обстановку, каким образом развивается любопытство к объектам окружающей среды.
Ученые верят, что подобные исследования позволят приблизить тот час, когда роботы смогут жить рядом с людьми.
Оставить комментарий
Ваш комментарий будет опубликован после модерации.